Contents
- 01.AI-RANを用いたフィジカルAIの開発と背景
- 02.物流倉庫におけるフィジカルAIの必要性
- 03.MEC AIとロボットAIが連携するシステム構成
- 04.現場での動作デモ
- 05.現場でのフィジカルAI検証の価値
- 06.フィジカルAIの現場適用に向けて
#AI-RAN #AITRAS #フィジカルAI
2026.03.25
ソフトバンク株式会社

ソフトバンクは、株式会社安川電機(以下、安川電機)と連携し、ソフトバンクの物流倉庫においてフィジカルAIの検証に取り組みました。このたび、その一連の検証にて、ソフトバンクのAI-RANのMEC(Multi-access Edge Computing)上で動作し、状況を理解するVLM(Vision-Language Model)と、安川電機のロボット上で動作の生成を行うVLA(Vision-Language-Action)の二つのAI(人工知能)を連携させることで、ロボットが柔軟で高精度な物体把持と配置作業を実現できることを確認しました。
本記事では、検証の背景や対象タスク、現場でのフィジカルAI検証の価値についてご紹介します。
ソフトバンクと安川電機は、日本発の技術によるフィジカルAIの社会実装に向けて協業し、AI-RANの低遅延処理が可能な大規模な計算リソースによって、ロボットがより高度な判断力を備え、対応可能な作業領域を拡張させることを目指した取り組みを進めています。これまでにオフィス向けフィジカルAIロボットのユースケースを共同開発し、スマートオフィスにおいてロボットが次世代のビル管理システムやAI-RANと連携することで、状況に応じて高度な判断を行い、柔軟な動作ができることを確認しました。また、1台のロボットが複数の役割を担う「多能工化」を実現する可能性を示しました。
関連プレスリリース:ソフトバンクと安川電機、AI-RANを活用した「フィジカルAI」の社会実装に向けて協業を開始(2025年12月1日)
今回は検証対象を広げ、新たにソフトバンクの物流倉庫にて検証を実施しました。検証を通して、AI基盤の高度化やデータの収集・蓄積、AIモデルの開発・改善を進めることで、フィジカルAIの社会実装を推進していきます。
物流倉庫では、業界全体の人手不足を背景に、これまで人が担ってきた作業の自動化が求められています。一方で、実際の工程には、形状や配置が一定ではない物品を扱う場面も多く、単純な繰り返し作業とは異なる難しさがあります。
ソフトバンクの物流倉庫にも、スマートフォンや関連アクセサリなどを扱う工程があり、その中には、未整列の状態で折り畳み式ボックスに配置された物品を取り出し、シュリンクパック用の台紙に並べる作業があります。このような工程では、単に対象物体を検出するだけでなく、どの物品から取り出すか、どのように把持するか、どう配置するかといった判断が必要になります。
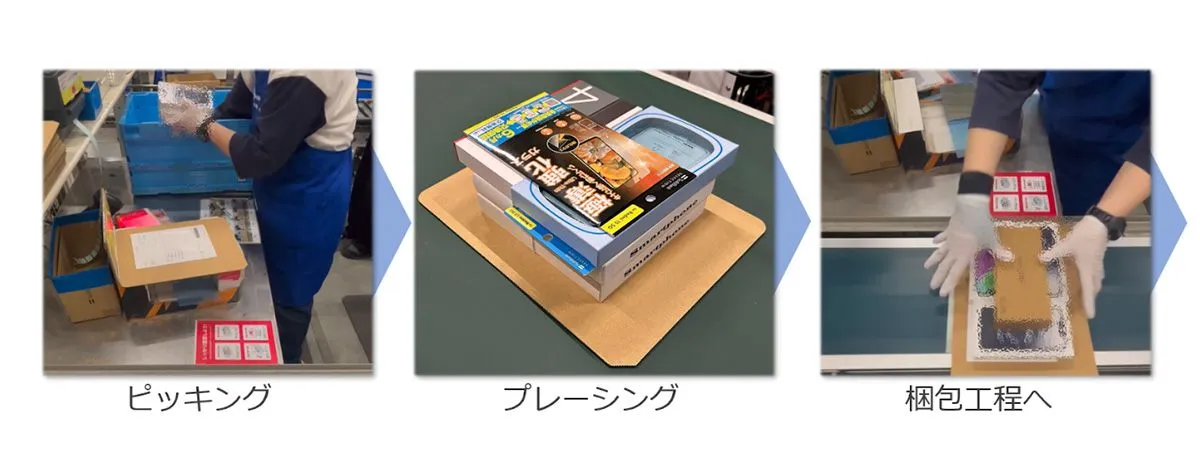
本検証がターゲットとする実環境のタスク
こうした作業は、物流倉庫で扱う新しい商品が出るたびに条件が変わってしまうため、あらかじめすべての条件をルールとして定義するのが難しく、現状では現場の作業者が物品の形状や重量を元に柔軟に対応しています。そこで今回の検証では、このような物流倉庫の実タスクを題材に、フィジカルAIを現場へ導入するための第一歩としての学習・動作検証を行いました。
物流システムと、MEC上で動作し、ロボットへの指示内容(サブタスク)を生成するAI(MEC AI)、ロボットの具体的な動作を生成するAI(Robot AI)が連携します。
・物流システム:物流拠点で扱う物品リスト、タスク関連情報を管理
・MEC AI:物流システムからのタスク関連情報、カメラ画像を元に、サブタスクを生成してロボットへ指示
・Robot AI:MEC AIからのサブタスク指示を元に、その場に応じた最適なロボットの制御コマンドを生成
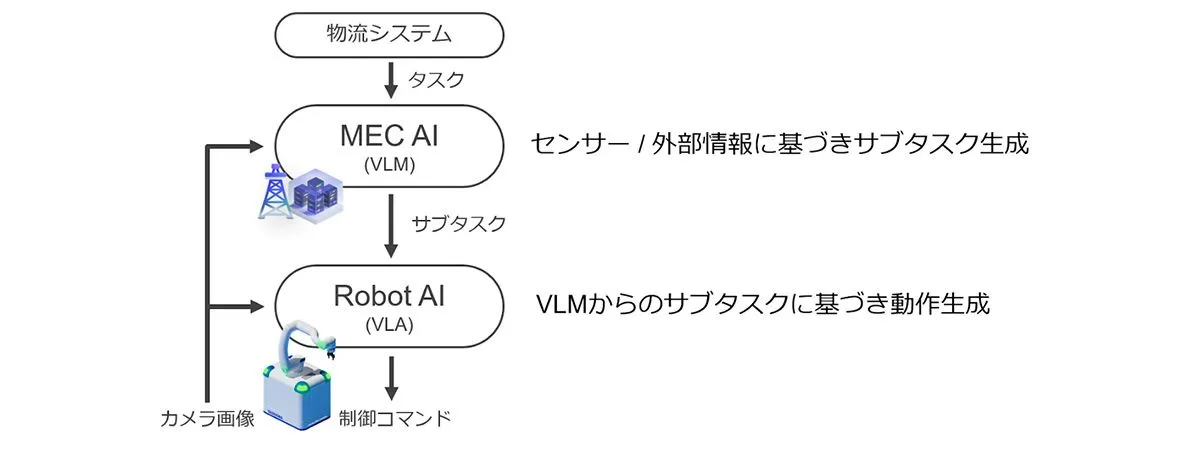
本検証で用いたフィジカルAIシステムの構成
MEC側で動作するVLMは、入力として台紙に置く対象物体の一覧情報とカメラ画像を受け取り、把持対象の物体位置や、把持した物体の配置位置を出力します。
VLMの学習には、折り畳み式ボックス内にさまざまなパターンで配置されたスマートフォンや関連アクセサリを、現場で実際に行われている作業をもとに、どの順番で把持し、台紙上のどこに配置すべきかをラベリングした学習データを用いています。
これにより、物品を初めて見る配置においても、把持対象物体の位置や、配置位置情報を出力できます。
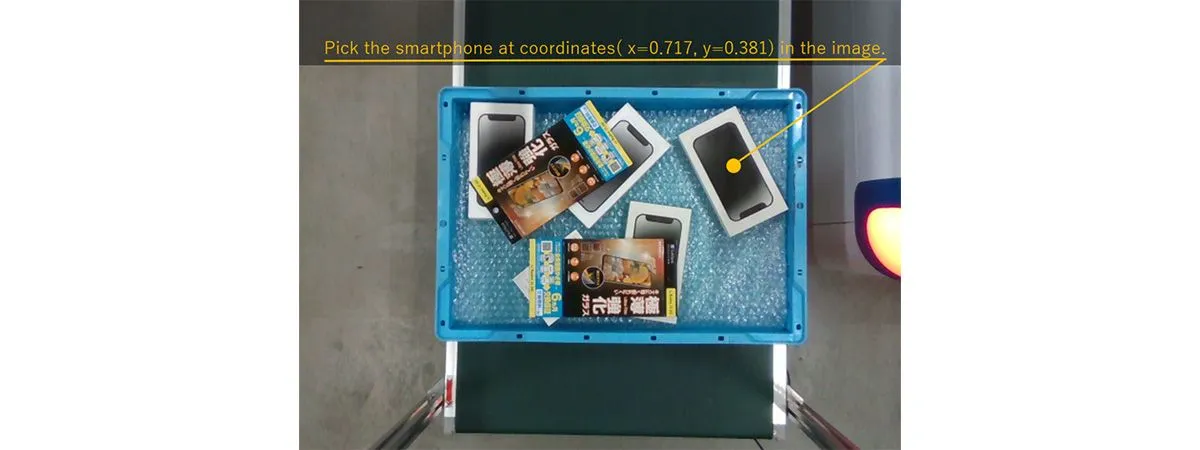
MECで動作するVLMを学習するために用いられる訓練データの一例
その場の状態に応じた把持・配置動作生成など、応答性と安全性が重要な処理はロボット側のVLAにて動作します。
入力として、VLMが出力したサブタスクに含まれる把持対象の物体情報とカメラ画像を与え、対象物体をどのように把持するかを考慮した各関節角度を出力します。ロボット上で動作を実行することで、実機制御に必要な応答性・安全性を確保しながら、MEC側のAI処理と連携できます。
今回の検証では、物流倉庫の実タスクを題材に、AIを学習させ、MECとロボットを連携させた構成で、対象物の認識から把持、配置までを一連の流れとして動作させることができました。
![]()

フィジカルAIでは、認識や動作生成といった個々の要素技術の性能だけでなく、それらを現場のタスクに応じてどのように構成し、システムとして動作させるかが重要です。また、学習の段階では、実機や現場から得られるデータを継続的に取り込み、モデル改善につなげていく仕組みも欠かせません。
ソフトバンクのAIインフラは、AI-RANによるMEC環境で推論を実行できるだけでなく、学習用GPU基盤と組み合わせることで、現場データをモデル改善へと素早くつなげられる点に特長があります。こうした取り組みを通じて、AIと通信技術の融合により1台のロボットが複数の役割を担う「多能工化」を実現、対応可能な作業領域を拡張し、人とロボットが同じ空間で安全かつ協調して働く未来の実現に貢献していきます。

2026.02.13
Blog
【解説】AI時代を支える社会インフラ「AI-RAN」とは
#AI-RAN #AITRAS #AI #RAN #AI-RANアライアンス
今回の物流倉庫での検証では、現場の実タスクを題材にフィジカルAIを学習させ、AI-RANを活用したMEC上で動作するVLMと、ロボット上で動作するVLAを組み合わせた構成により、動作検証を実施しました。
ソフトバンクは、AI-RANのような次世代インフラとロボティクスの融合を通じて、フィジカルAIの現場適用を進め、今後さらに現場導入を加速するとともに、その可能性を広げていきます。