Contents
- Blog
- 無線, ネットワーク, コンピューティング
AI処理の動的なオフロードと通信ネットワークの最適化により、安定したフィジカルAIを実現
#AI-RAN #フィジカルAI
2026.03.27
ソフトバンク株式会社
本記事では、ソフトバンク株式会社(以下「ソフトバンク」)がエリクソン(NASDAQ:ERIC)と連携して開始した共同検証の一環として、ソフトバンクが開発中のAI-RANのMEC(Multi-access Edge Computing)基盤を活用したリアルタイム処理技術と、エリクソンのネットワーク機能を活用した5G(第5世代移動通信システム)ネットワークを組み合わせることで、ロボットとネットワーク、計算資源を一体的に連携させた、低遅延で高信頼な制御を実現する取り組みを紹介します。
関連プレスリリース:ソフトバンクとエリクソン、AI-RANを活用した低遅延・高信頼ネットワークによるフィジカルAIの実証に成功(2026年2月27日)
1. 背景:フィジカルAIの実環境での実装に向けた通信ネットワークの役割
近年、ロボットが周囲の状況を的確に捉え、柔軟に判断・動作を行うフィジカルAIへの注目が高まっています。しかし、こうした柔軟な判断や動作に必要なAIの処理内容や計算量は、実環境では状況に応じて大きく変化します。そのため、高度な判断が求められる場面では、ロボットに搭載された計算資源だけでは十分に対応できない場合があります。
こうした中、ソフトバンクとエリクソンは、AI-RANに関する共同研究開発の一環として、フィジカルAIのユースケースの検証を進めています。両社の技術を活用し、ロボットを外部の計算資源と連携させることで、より柔軟で高度な判断・動作の実現を目指しています。
このようにロボットが外部の計算資源を活用する場合、AI処理の結果をリアルタイムにやり取りする必要があり、それを支える通信ネットワークは必要不可欠です。
しかし、従来のネットワークは、動画視聴などの下り通信を中心とした用途を前提に設計されています。また、多くのユーザーで通信資源を共有し、インターネットを介して多様なトラフィックが混在するため、通信品質はベストエフォートで提供されています。その結果、ネットワークの混雑状況に応じて遅延やジッターが変動してしまいます。
これに対し、AI時代のネットワークにはリアルタイム性が求められます。特に、センサーデータなどのデバイスからの上り通信への対応、遅延の上限を保証すること、そして移動中でも安定した通信を維持することが重要です。例えば、フィジカルAIはロボットが「見て(知覚)→考えて(推論)→動く(制御)」のサイクルをリアルタイムに繰り返しながら動作します。
そのため、外部計算資源を利用する際に、デバイス接続数の増加や大容量データ通信の発生等によって通信ネットワークに遅延や途切れが生じると、この「見て→考えて→動く」というサイクルが乱れ、動作の遅れや不安定さにつながる可能性があります。
このように、フィジカルAIにおいて通信ネットワークは非常に重要な役割を担います。
2. 課題:固定的な計算資源とネットワーク設計が通用しない
実環境では、状況に応じて必要なAIの処理内容や計算量が動的に変化します。また、AI-RANのMEC基盤などの外部の計算資源を活用する場合は、計算負荷に加えて通信の遅延やスループットも変動し、場合によっては通信が不安定になることがあります。
例えば、単純な環境ではロボット内部の計算資源だけで処理を完結できますが、混雑した空間や障害物が増加する状況では、画像認識や経路計算の負荷が急増し、より高度な判断や動作が求められます。
このような場合、処理を外部の計算資源へオフロードすることで、ロボット単体では実行が難しい、より高度な認識や判断を可能にするAIモデルを活用できるようになります。
一方で、このように外部計算資源を活用する場合、通信を介して処理結果をやり取りすることが前提となります。そのため、通信品質が混雑などによって低下すると、End-to-Endの遅延が増大する可能性があります。さらにロボットは移動するため、常に通信品質の高い環境にいられるとは限りません。
このように、ネットワークを経由して外部の計算資源にAI処理をオフロードする場合には、低遅延かつ高信頼な通信の確保に加え、ロボット・ネットワーク・計算資源を一体的かつ動的に制御することが重要です。
つまり、
・処理をどこでどのように実行するか
・どの処理の通信を優先するか
といった判断を統合的に行うアーキテクチャが必要とされていました。
3. 課題解決:ネットワーク及び外部計算資源を一体的に連携・制御できるオフロードアーキテクチャ
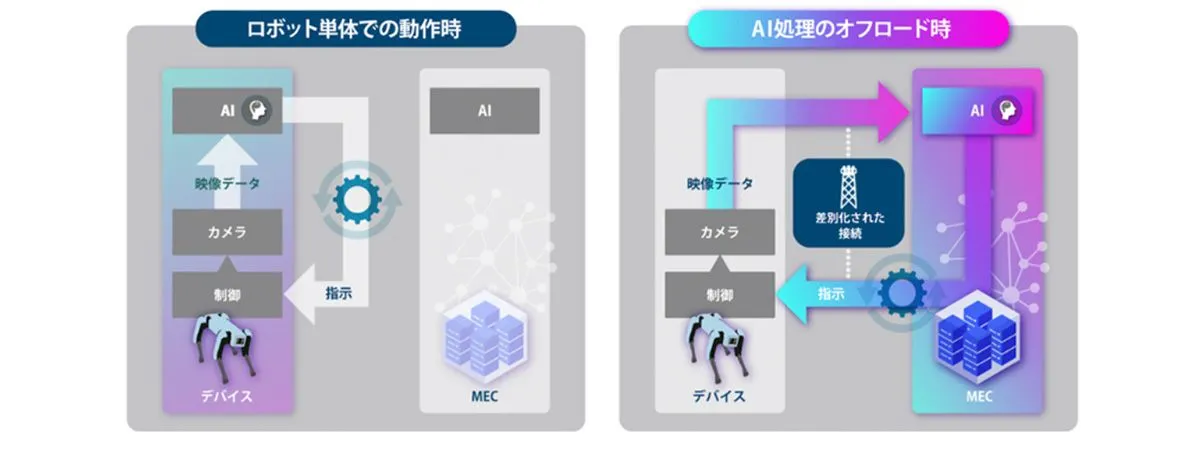
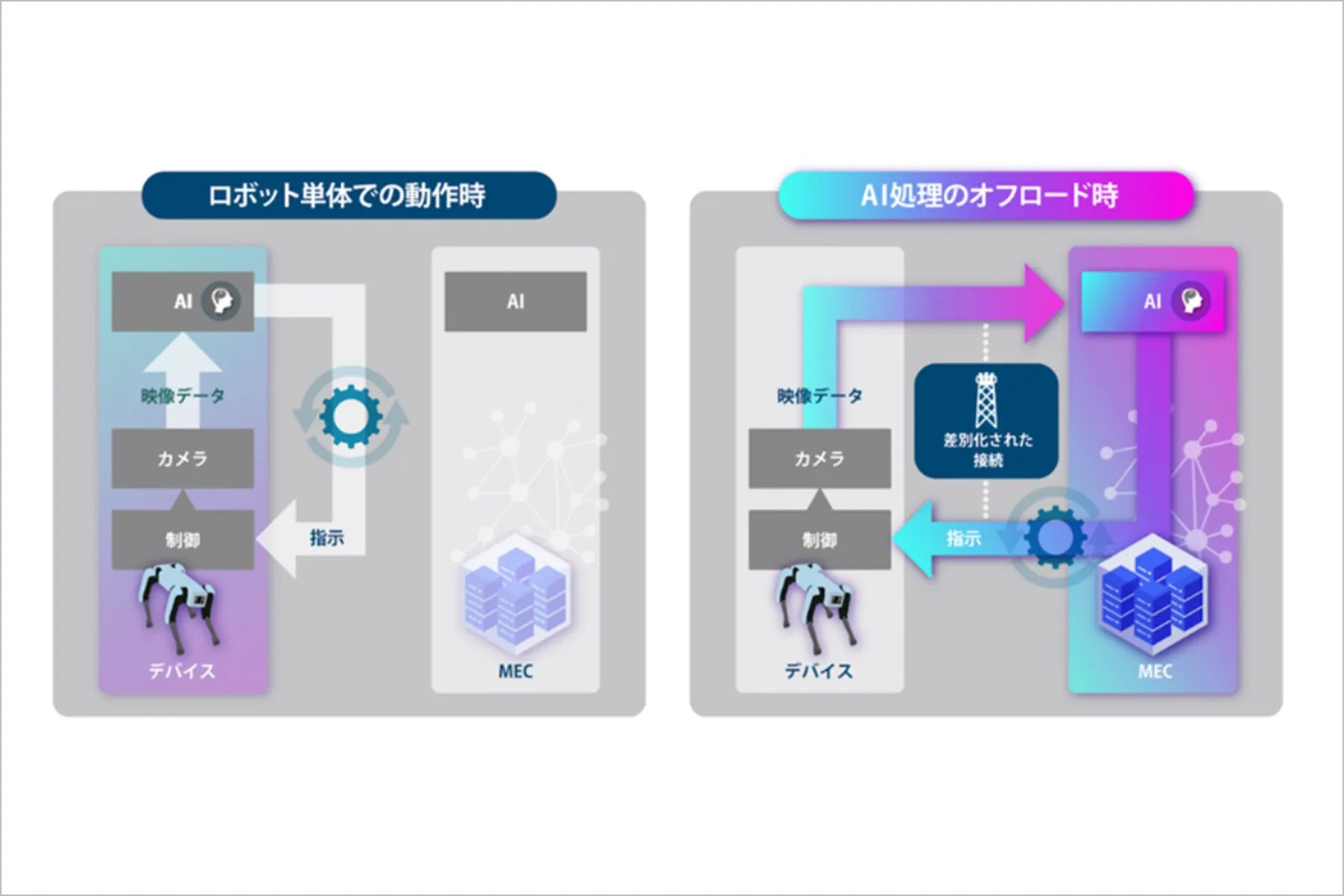
図1. アーキテクチャ概要
本取り組みでは、上記課題を解決するために、ソフトバンクが開発中のAI-RANのMEC基盤を活用したリアルタイム処理技術と、エリクソンの差別化された接続(Differentiated Connectivity)※1を活用し、ロボットとネットワーク、外部のMEC基盤上の計算資源を一体的に連携・制御できる、AI処理のオフロードアーキテクチャを構築しました。
このオフロードアーキテクチャは、AI処理をロボット単体で実行するか、外部の計算資源であるMEC基盤上で実行するかを、計算資源、通信品質、遅延、タスクの複雑度等の状況に応じて動的に切り替えることで、ロボットの最適な制御を実現します。
さらに、通信においては、遅延やスループット、信頼性などの多様なアプリケーション要件に応じて、ネットワークスライシングや優先制御を含む、差別化された接続を提供します。これにより、ネットワークの最適化が可能になります。
※1: 差別化された接続とは、ネットワークスライシングなどの機能により、5G SAコアおよび5G RANソフトウエアを通して、帯域幅や遅延などの通信性能を安定的に確保する機能のこと。
4. 実証実験
今回のシステムでは、「空港内で利用者に追従して荷物搬送を支援するロボット」や「不審者を追跡するセキュリティロボット」等のユースケースを想定し、3つのパターンで実証実験を行いました。
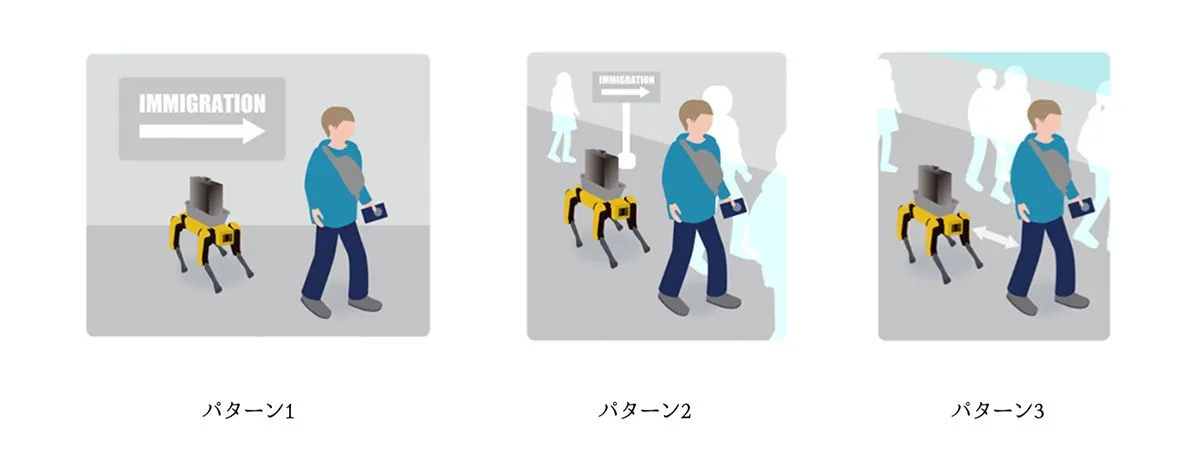
図2. 実証実験全体のイメージ
パターン1:AI処理をロボット単体で完結
人が少なく環境が単純な状況では、ロボットの内部計算資源(CPU/GPU)のみでAI処理を実行でき、End-to-Endの遅延も最小化できます。一方で、ロボット側のCPU/GPU使用率が高くなり、電力消費も増加します。

図3. ロボット単体で処理時
パターン2:AI処理をMEC基盤にオフロード
人流の密度が高まり、環境が複雑化すると、ロボットにはより柔軟な判断や動作が求められます。このような状況では、より高度な判断が可能なAIが必要になり、AI処理はMEC基盤へオフロードされます。その結果、ロボットは単体で動作する場合に比べてより柔軟な動きが可能となり、ロボット側の計算資源の使用率も低減されます。

図4. オフロードモードで処理時
パターン3:差別化された接続の適用
下図のように、オフロードモードで動作中にユーザー数の増加などによってネットワークの混雑が高まると、通信遅延が増加する可能性があります。このような場合には、ネットワークスライシングを含む差別化された接続を適用し、ロボットのトラフィックを優先的に制御します。その結果、End-to-Endの遅延が低減され、アプリケーション性能の向上が確認できます。

図5. 差別化された接続の適用
本システムは、Jetsonを備えたUnitreeのGo2ロボット、GPUを備えたMEC基盤(外部計算資源)、差別化された接続に対応した5Gネットワーク、CNN(YOLO)やLLM等多様なAIモデル、ROS2、MQTT、HTTPといった多様な通信方式で構成されています。また、オフロードの判断や差別化された接続適用判断は、CPU/GPU使用率、通信スループット、End-to-Endの処理遅延など、複数のメトリクスを監視し、総合的に判断して意思決定を行うという仕組みになっています。
実証実験の結果、下記2点を確認できました。
①パターン1とパターン2の実証実験で、下図に示すロボット側のGPU使用率のグラフから、オフロード前(パターン1)と比較して、オフロード後(パターン2)にはロボット側のGPU使用率が大きく低下していることが確認されました。
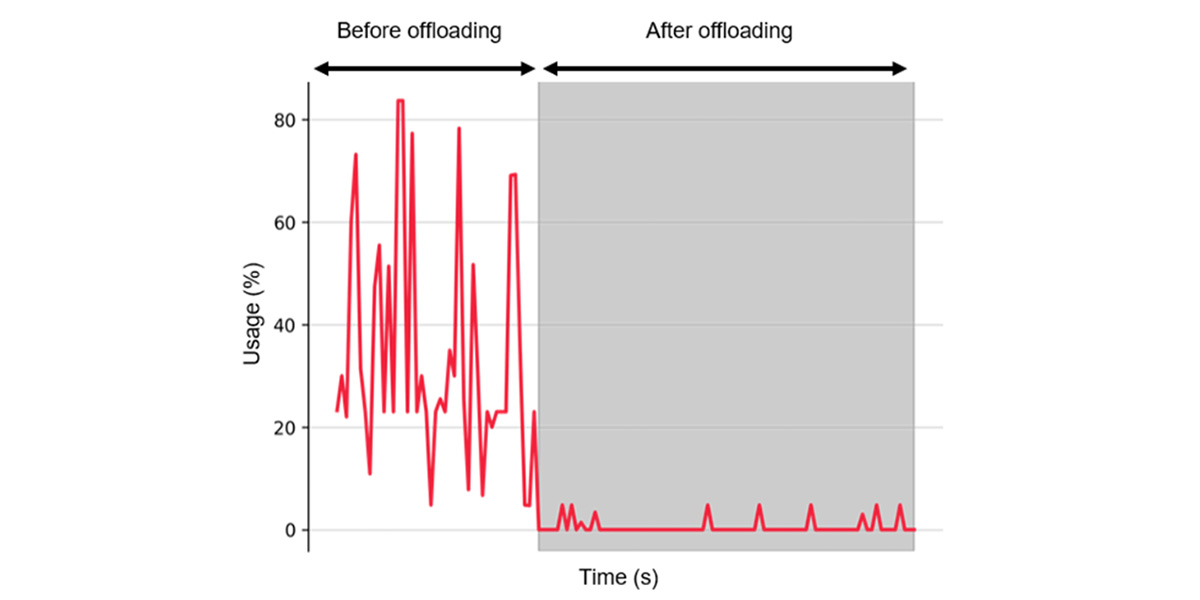
図6. ロボット側のGPU使用率
➁パターン3の実証実験では、ネットワーク混雑時に通信スループット(Throughput uplink)が低下(下図の通信スループットグラフの最後の部分:約20Mbps→10Mps以下へ低下)した際、ロボットのEnd-to-Endの遅延(下図の遅延グラフの最初の部分)が大きく増加することが確認されました。その後、差別化された接続を適用することで、遅延は大幅に低減し、約400ms→100ms程度まで短縮されました。
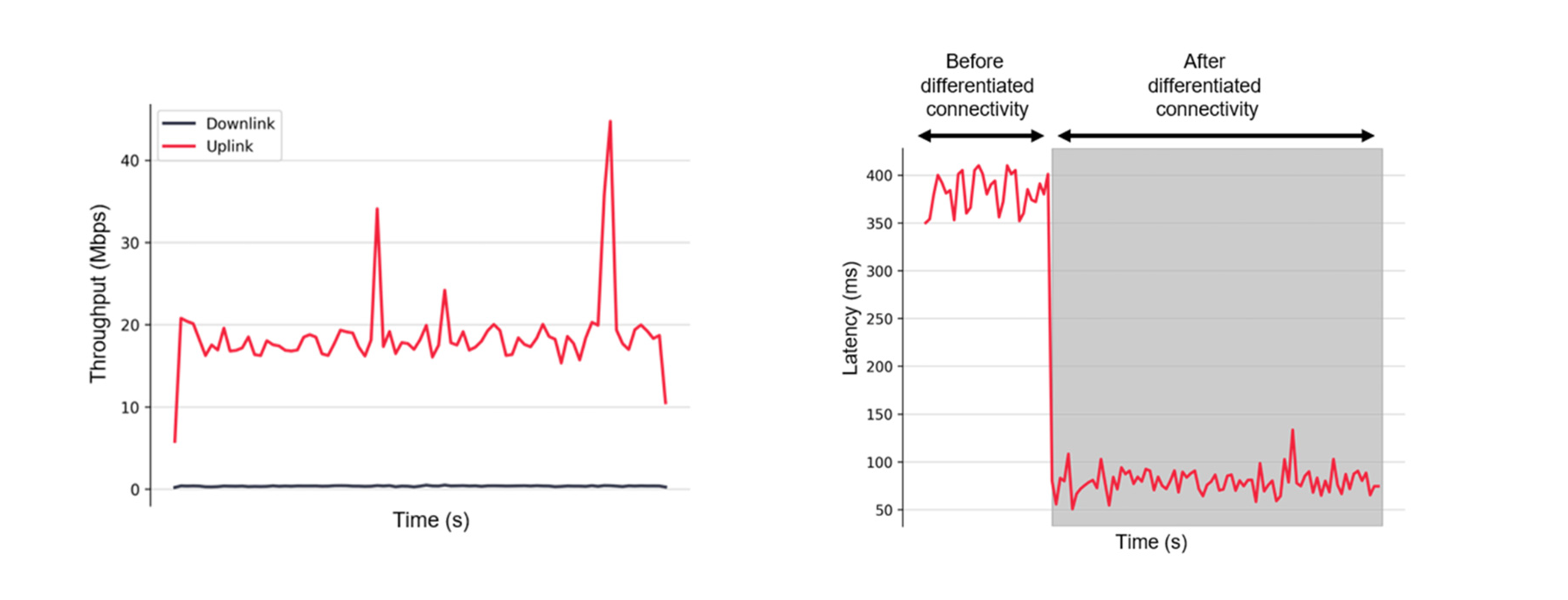
図7. (左)ロボットの通信スループット(オフロード前)、(右)ロボットのEnd-to-Endの遅延(Latency)
実際の環境においては、これら3つのパターンは独立して存在するものではなく、環境や通信状況に応じて連続的に切り替わります。また、上記の定量実験に加え、他にも同様の実証実験を実施しました。例えば、上記計算資源に関するグラフはGPUを用いた実験例ですが、CPUを用いた推論でも同様の傾向が確認されました。さらに、5Gではなく、干渉の少ない環境でWi-Fiを用いた場合でも、計算資源使用率の変化や時間帯による遅延の差など、同様の傾向が見られました。
これらの結果から、計算資源と通信資源(特に差別化された接続が可能な通信ネットワーク)を一体的に制御するオフロードアーキテクチャは、安定したフィジカルAIの実現において重要かつ有効であることが実証されました。
5. まとめ
本実証では、AI処理の動的オフロードと、差別化された接続による通信ネットワークの最適化を組み合わせることで、フィジカルAIの安定した動作を実現できることを確認しました。
特に、環境変化に伴う計算負荷の増大に対しては、MEC基盤へのオフロードによってロボット側のGPU使用率を大幅に低減できること、さらにネットワークが混雑した状況においても、ネットワークスライシングによる優先制御を適用することで、End-to-End遅延を大きく改善できることを実験的に示しました。
フィジカルAIの社会実装を加速するためには、AIモデルの高度化だけでなく、それを支える通信・計算基盤の一体化が不可欠です。ソフトバンクとエリクソンは、本実証で得られた知見をもとに、フィジカルAI時代に求められる次世代ネットワークの実現を目指していきます。