Contents
- 01.電波で「見る」時代へ:6Gセンシング技術
- 02.構築した検証システムと処理フロー
- 03.電波暗室内検証
- 04.実環境試験と自己干渉対策へ
#6G #ISAC #センシング
2026.03.31
ソフトバンク株式会社
自動運転車、ドローン、ロボットなどAIで駆動するシステムは、正確な状況認識に基づいた意思決定を実現するために膨大なセンシングデータが必要となります。センシングに用いられるデータとして、光学カメラにより得られる画像情報、超音波センシングにより得られる測距情報、電波センシングにより得られる測距情報・測角情報などがあります。この中でも電波センシングは見通し外や悪天候における検知に優位性があり、交通監視や車載レーダー[1,2]などで使用されています。一方、電波は通信をはじめとしたさまざまなアプリケーションに使用されますので、周波数利用は逼迫状態です。そこで、移動通信システムから放射される電波を用いたセンシングが注目されています。実際に次世代移動通信規格である6Gのシナリオの中にはセンシングと通信の融合(Integrated Sensing and Communication)が加わっており、さまざまな機関でISACに関する検討が始まっています[3]。
そのような背景の中、我々は通信用途に最適設計された3GPP準拠のフレーム構造に大幅な変更を加えることなくセンシング機能を実現するために、参照信号(端末が接続先基地局を決定するための受信電力測定などに用いられる信号)を利用したセンシングアプローチの検討を行っています[4]。ターゲットの位置を把握するためには角度や距離などの情報が必要になります。その中でも、角度情報を取得するためには複数アンテナ素子を用いたアレーアンテナを使用する必要があり、高分解能を達成するためにはアンテナ素子の数を増加させる必要があります。しかしながら、アレーアンテナの素子数を増やすことは、実際のシナリオでは運用コストによって制約されることが多いです。そこで、アンテナ素子数を増加させることなく分解能を向上させる方法として、Capon法[5]、FISTA法[5]、IAA法[6]などの方向推定アルゴリズムを用いた方法がさまざまな機関で研究されています。
今回は、3GPP準拠信号に含まれる参照信号を活用したセンシング方法に対し、ターゲット検知の高精度化を図るために、方向推定アルゴリズムの適用を図ります。はじめに、実際に電波を活用した測定を実施するために構築した評価系について紹介を行います。次に、電波暗室内に複数ターゲットを設置し測定評価を行います。そして、Capon法、IAA法、FISTA法を適用した場合の実験結果について示します。
図1に構築した検証システムを示します。我々はGPUサーバー上に構築された基地局にセンシング機能をインストールすることでセンシング(レーダー)機能を実装することを想定しています。そのため、構築した検証システムでは、センシング用の受信装置は基地局付近に設置されます。さらに、実際に3GPPに準拠したMIMO信号伝送が可能なことを示すために、移動機相当の受信評価装置を有しております。この受信評価装置では、Txから送信された3GPP準拠信号を受信・復調処理[7]を行うことで受信した信号点の描画を行います。センシング用の受信装置では、次のステップ(信号の測定とSSB復調、方向推定アルゴリズム処理)により、ターゲット位置の測定を行います。
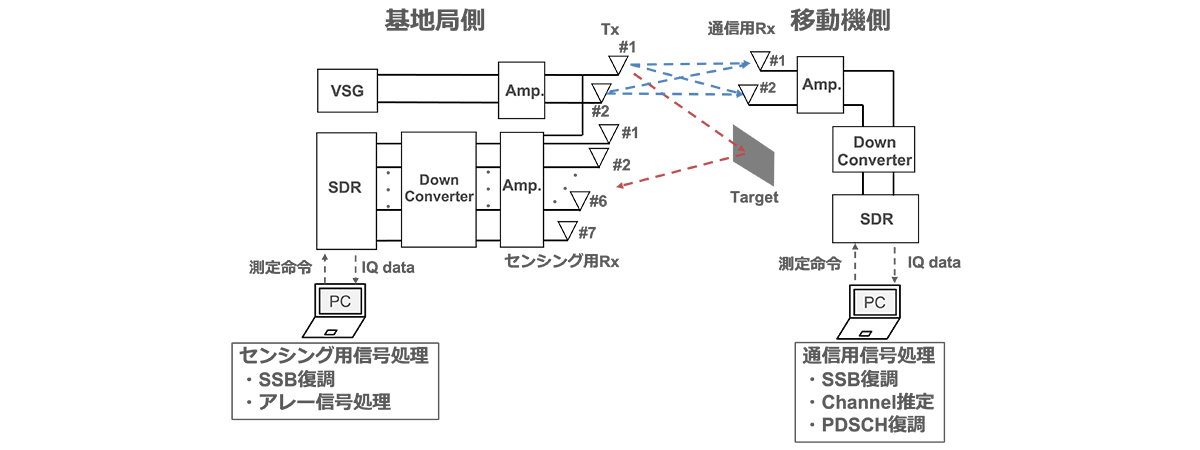
図1. 構築した検証システム
ここでは、受信信号に対して参照信号であるSSB(Synchronization Signal Block)の復調処理を行い、ターゲット(検知対象)からの反射特性を取得します。図2に示す通り、一般的なセンシング用受信装置が受け取る信号には、ターゲットからの反射信号だけでなく、送信機(Tx)から受信機(Rx)へ直接届く信号(回り込み波)が含まれています。この信号をそのまま処理すると、直接波の電力が反射信号の電力よりも圧倒的に大きいため、ターゲットの検知精度が著しく低下してしまいます。そこで本手法では、あらかじめターゲットが存在しない状態で復調データを取得しておきます。実際の測定で得られたデータから、この事前のデータを差し引く(減算する)ことで、回り込み波の影響を排除し、ターゲットのみの反射特性を正確に抽出することが可能になります。
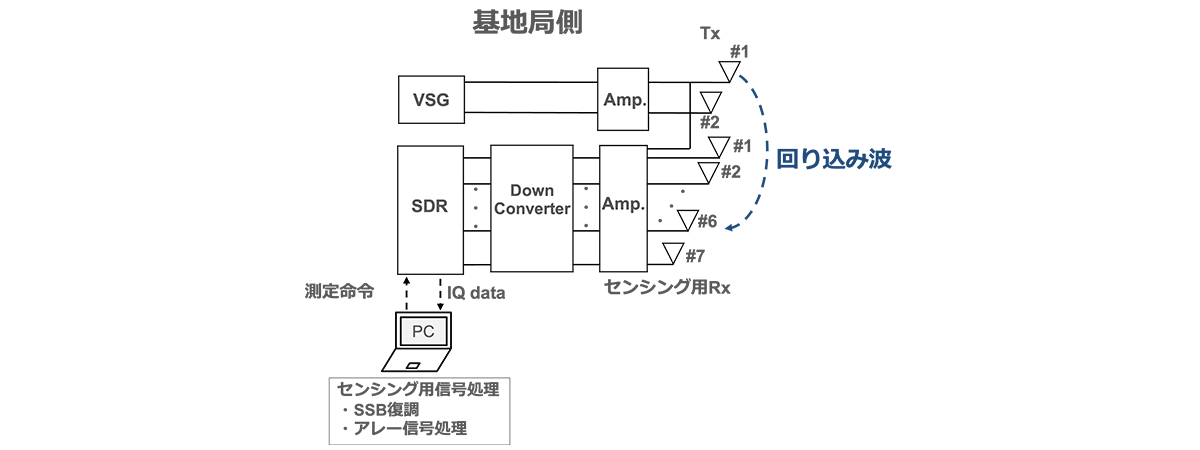
図2. 送信アンテナからの回り込み波
ターゲット方向の推定を行うために、回り込み波の影響を除外して得られた反射特性に対し、方向推定処理を行う。ここで、選択可能なアルゴリズムはBeamformer法[5]、Capon法[5]、FISTA法[5]、IAA法[6]である。表1にそれぞれのアルゴリズムの特徴と得られる角度スペクトルを図3に記載する。
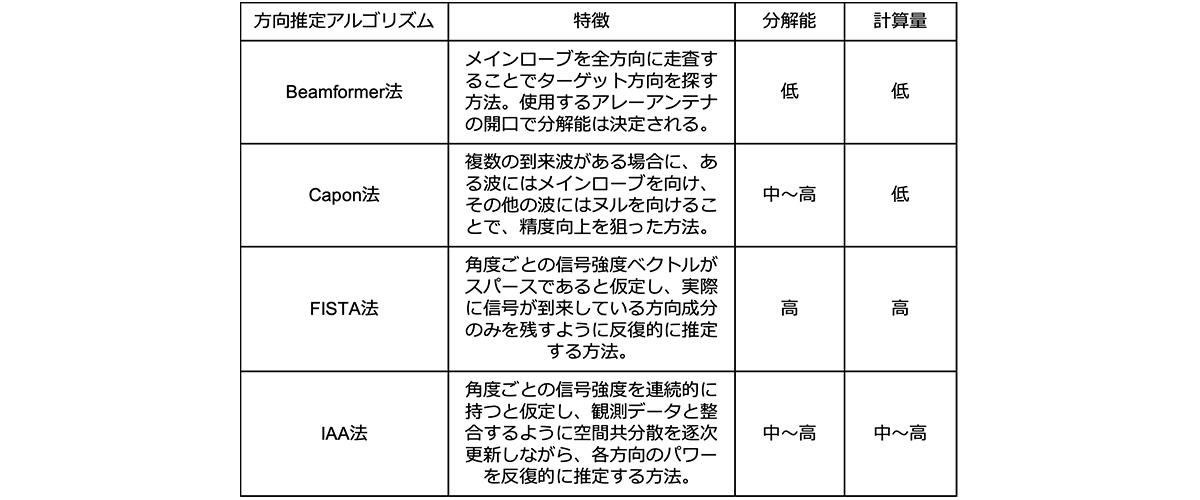
表1. 今回検討した方向推定アルゴリズムの特徴
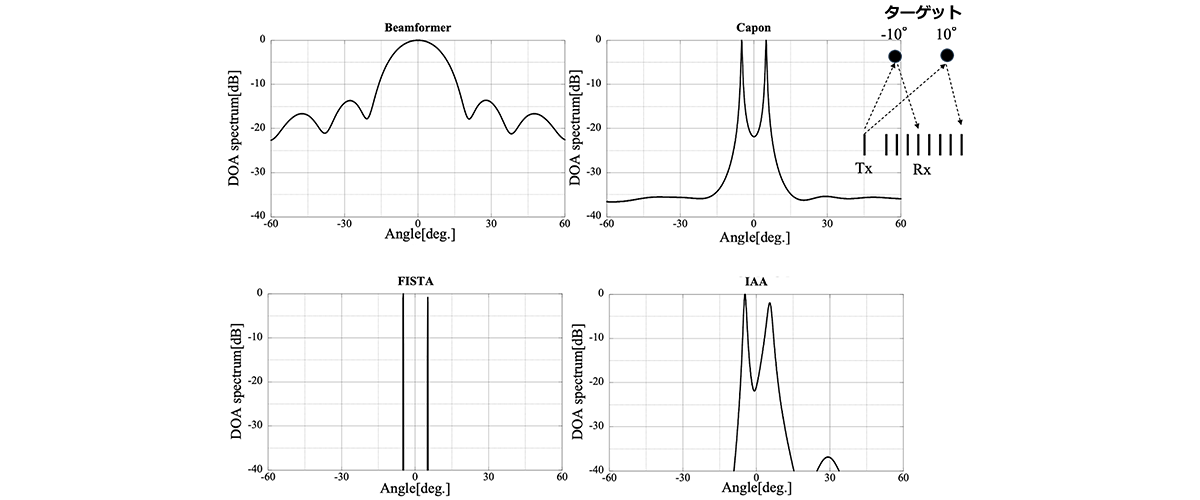
図3. それぞれのアルゴリズムで得られる角度スペクトラムの一例
(8素子リニアアレーアンテナ使用)
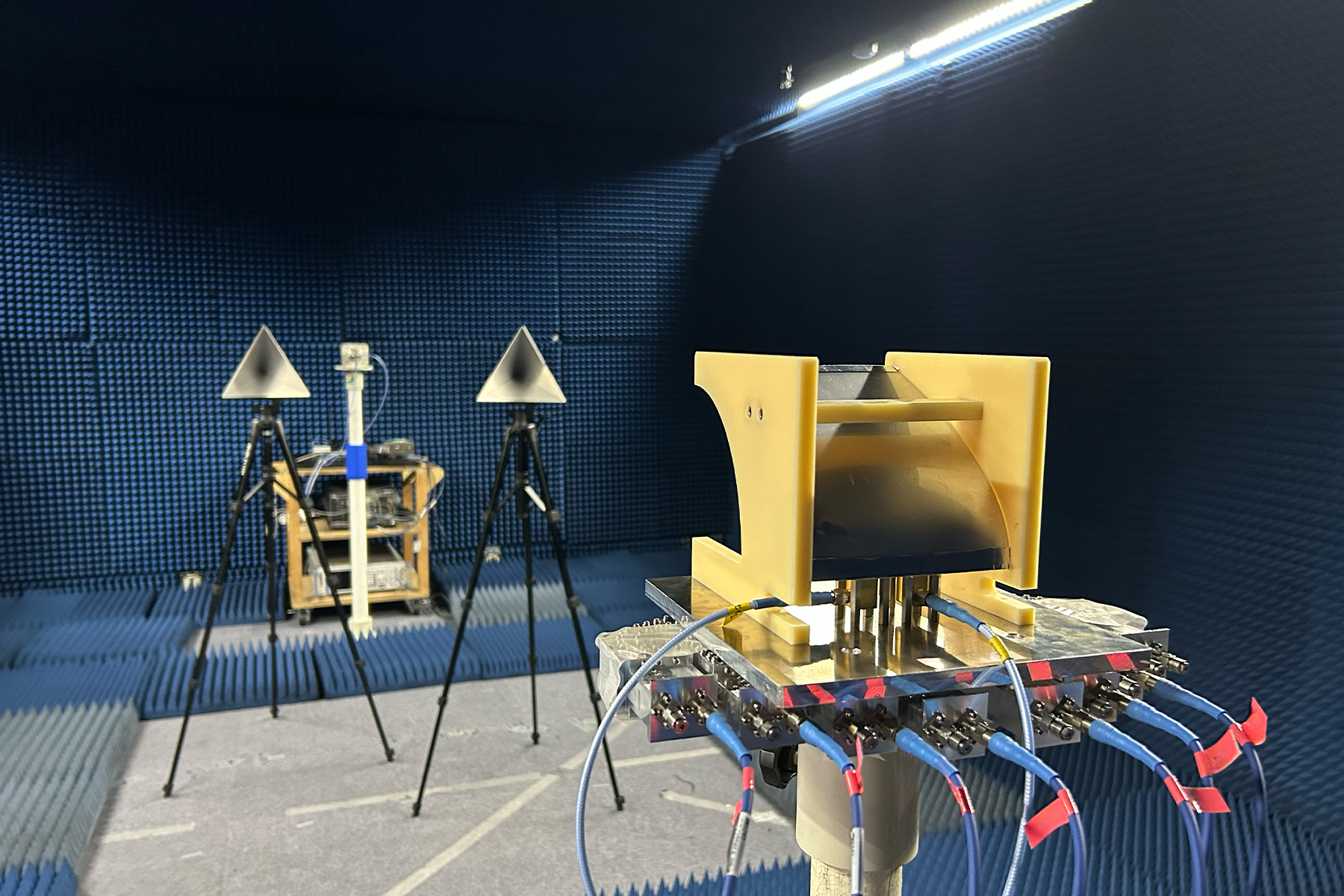
好適な方向推定アルゴリズムの検討を行うために、図1の評価装置を用いて基礎特性の取得を行いました。図4に電波暗室内の検証風景を示します。今回は、理想的なターゲットである金属と人をターゲットにして検証を実施しました。
基地局側の送信アンテナは垂直面のビーム幅を絞り、水平面のビーム幅が広い1次元パラボラアンテナを使用しています。そして、送信アンテナからは周波数29.7GHz、帯域幅100MHzの5GNRのダウンリンク信号が2ストリーム分送信され、移動機側で受信復調処理を行うことでPDSCH(データ伝送に用いられる共有チャネル)のMIMOストリームのコンスタレーション特性が得られます。センシングに用いる基地局側の受信アンテナには7素子リニアアレーアンテナを使用しており、このアンテナを介してターゲットからの応答を取得し、方向推定アルゴリズムを適用することで角度スペクトラムを取得します。
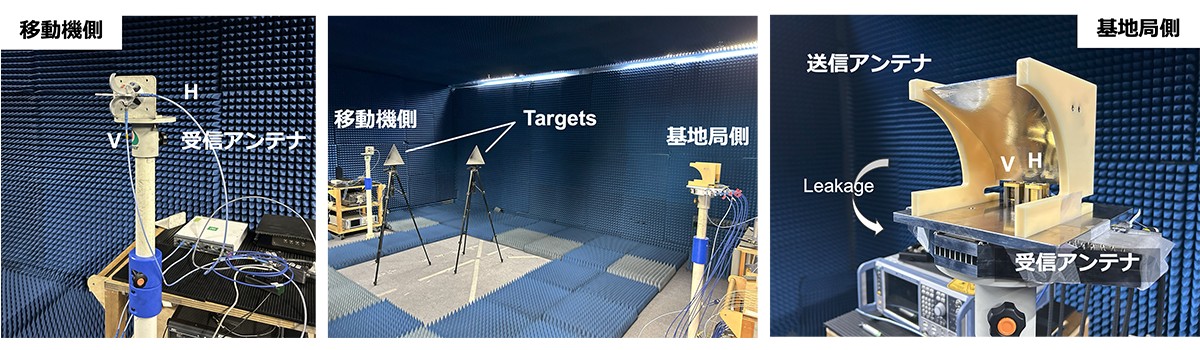
図4. 電波暗室内検証の様子
検証結果の一例を示します。移動機側の受信システムで得られた受信復調結果を図5に示します。図5より、2つのストリームともに16通りの場所に集まっていることが確認でき、5GNR信号のMIMO伝送ができていることがわかります。
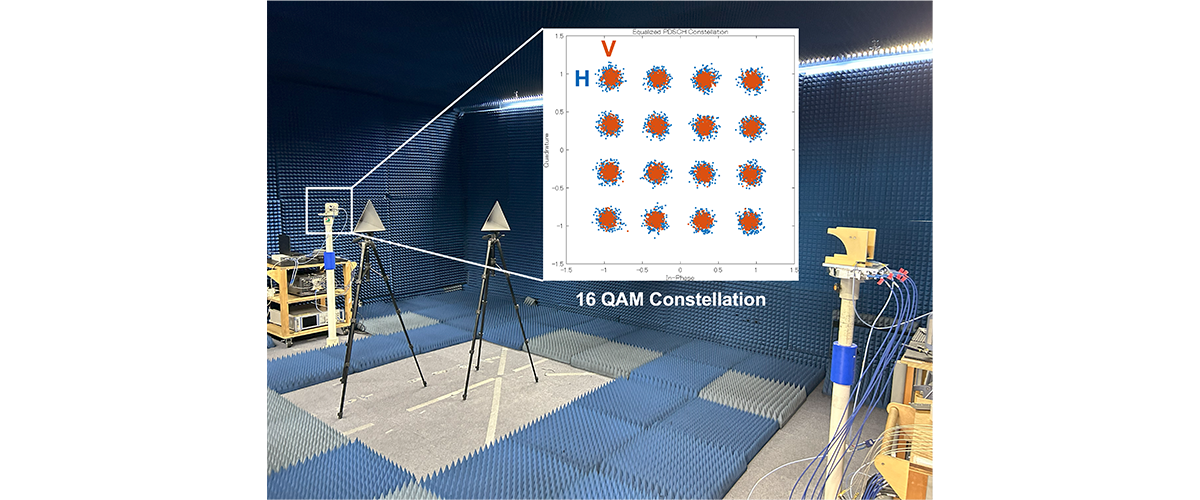
図5. 受信復調結果(16QAMコンスタレーション)
次にセンシングの結果として、ターゲットを金属とした時の結果を図6に、ターゲットを人とした時の結果を図7に示します。なお、波源検出精度の評価に際しては以下の点に着目しました。
(i)ターゲットが近接した場合でも分離検出が可能か。
(ⅱ)ターゲットの種類によらず安定して方向推定が可能か。
図6にターゲットを金属としたときの結果を示します。金属の場合、アレーアンテナが受信する信号の相関が高いため、Beamformer法・Capon法ではスペクトラムのピークが1つしか観測されておらず、うまくターゲット方向を分離できていません。この場合、アレーアンテナの素子数を物理的に増加させ、空間平均法と呼ばれる手法を導入することで検知精度を向上させる必要があります。次に、FISTA法・IAA法では概ねターゲットの方向にスペクトラムのピークが観測できており、ターゲット方向を分離できていると考えられます。つまり、FISTA法、IAA法ではアレーアンテナの素子数を増加させずに方向推定アルゴリズムによりターゲット検知精度の向上が可能となります。
図7に、ターゲットを人とした場合の結果を示します。金属を対象とした場合にはターゲットの分離が可能であったFISTA法ですが、本条件ではノイズの影響を大きく受け、ターゲット位置が不明確となりました。一方、IAA法ではサイドローブレベルは上昇したものの、ターゲットの分離が良好に行われていることが確認できます。人からの反射波の電力は、金属の場合と比較して受信時のSNR(信号対雑音比)が低下し、さらに呼吸や身体の揺らぎにより電力の時間変動が大きくなります。このような受信電力の不安定さに起因して、FISTA法ではターゲット方向の推定が困難になったと考えられます。一方、IAA法は受信電力の不安定さの影響を受けにくく、安定してターゲット方向の分離が可能であることが確認できました。
これらの結果から、5GNRに含まれる参照信号に対し、IAA法を適用することで、アンテナ素子数を増加させることなく安定的に高精度なターゲット方向の把握が可能となります。
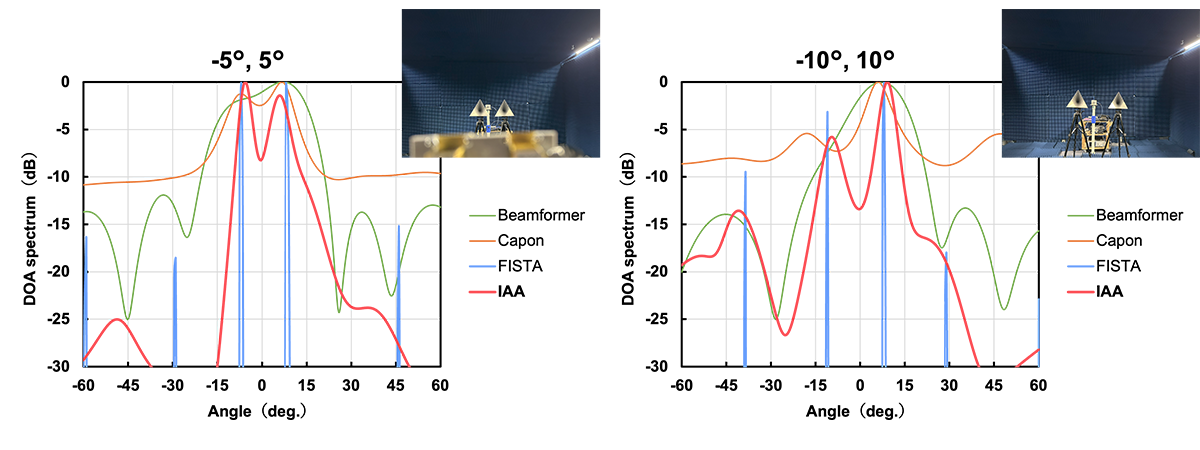
図6. ターゲットを金属としたときの角度スペクトラム
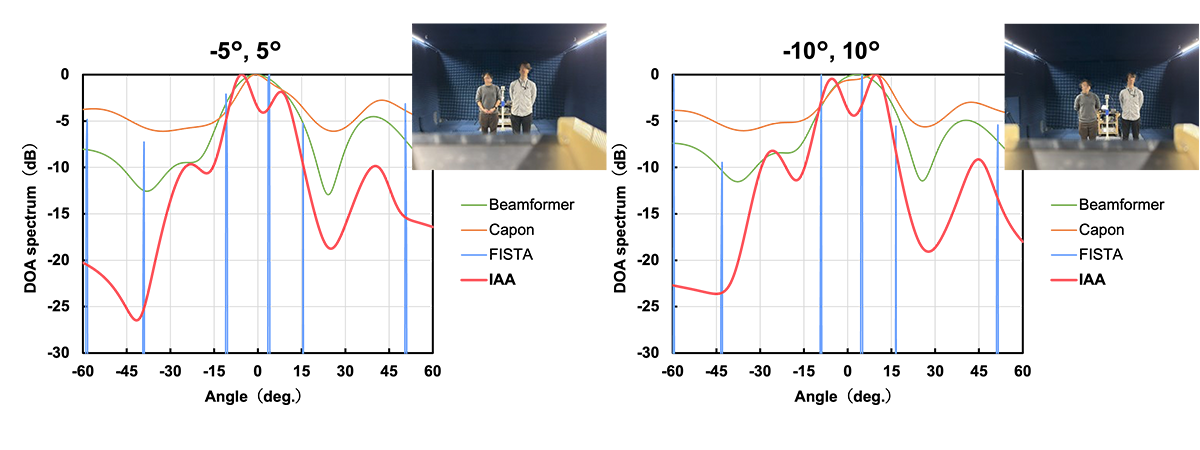
図7. ターゲットを人としたときの角度スペクトラム
本記事ではターゲットから反射した3GPP準拠信号に含まれる参照信号に対し、さまざまな方向推定アルゴリズムを適用しターゲット方向の検知精度について検討しました。その結果、IAA法を用いることで安定してターゲット方向の識別が可能なことがわかりました。今後は、実際に基地局を設置するサイトでの試験を行う予定です。一方で、今回検討している基地局近傍にセンシング用の受信アンテナを設置する方式は、送信信号がセンシング用受信装置に直接入力されるため、送信電力が大きくなると、センシング用受信装置の破損に繋がる可能性があります。よって、この直接波成分を抑圧するようなアナログ・デジタル自己干渉技術[8]の検討もする必要があります。
なお、これらの取り組みの一部は国際会議[9]で報告を行い、当研究所員がYoung Engineer Awardを受賞するなど高い評価を得ています(図8を参照)。今後もISACの実現に向けて検討を行っていきます。
図8. Young Engineer Award賞状
[1] I.Bilik, et.al., ”The Rise of Radar for Autonomous Vehicles: Signal Processing Solutions and Future Research Directions,”IEEE Signal Processing Magazine, pp.20-31,Vol.36, Issue 5, September 2019.
[2] K. Mishra, et.al.,”Toward Millimeter-Wave Joint Radar Communications: A Signal Processing Perspective,” IEEE Signal Processing Magazine, pp.100 - 114,Vol.36, Issue 5, September 2019.
[3] Z. Wei, H. Qu, Y. Wang, X. Yuan, H. Wu, Y. Du, K. Han, N. Zhang, and Z. Feng, "Integrated sensing and communication signals towards 5G-A and 6G: A survey," IEEE Internet Things J., vol. 10, no. 13, pp. 11068–11092, Jul. 2023.
[4] XGMF 6G Radio Technology Project, “Beyond 5G White Paper -Sensing Technologies-,”pp.75-77, 2025.
[5] 菊間 信良,”ISACシステム実現に向けた方向推定の基礎,”MWE2024,FR1A-1, 2024年11月.
[6] T. Yardibi, J. Li, P. Stoica, M.Xue, and A. B. Baggeroer, “Source Localization and Sensing: A Nonparametric Iterative Adaptive Approach Based on Weighted Least Squares,” IEEE Transactions on Aerospace and Electronic Systems, vol. 46, no. 1, 2010.pp. 425–443
[7] NR PDSCH Throughput, https://www.mathworks.com/help/5g/ug/nr-pdsch-throughput.html, refer March 23, 2025.
[8] 宮地祐一,”帯域内全二重, ”電子情報通信学会誌 Vol.109 No.01,pp.55-57,2026年1月.
[9] K.Tomimoto, et.al,. “Study on Improving Target Detection Accuracy of Sensing Using Mobile Communication Systems,” 2025 International Symposium on Antennas and Propagation(ISAP), Fukuoka Japan, October 2025.