3. System Configuration Linking MEC AI and Robot AI
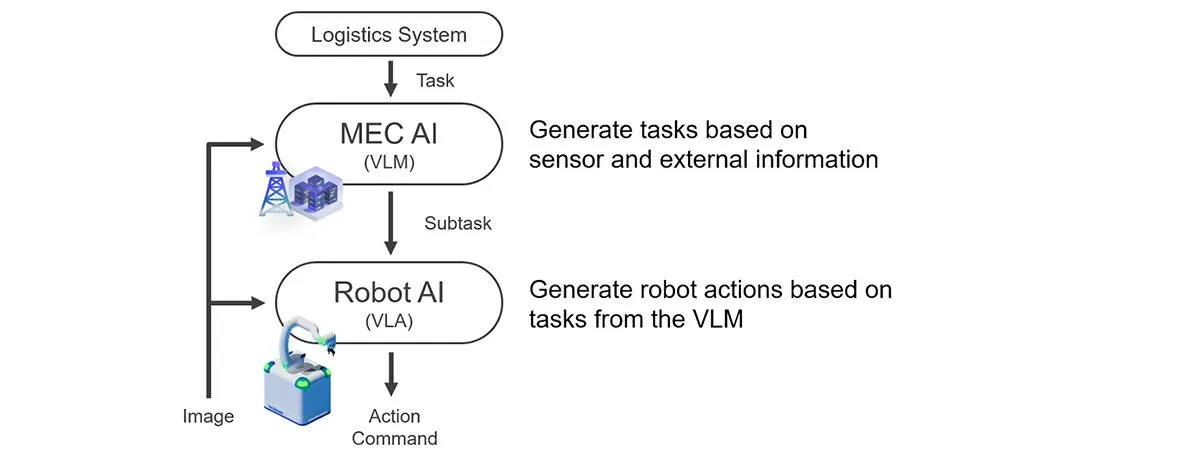
The logistics system works together with AI running on MEC that generates instructions for the robot in the form of subtasks (MEC AI), as well as AI that generates the robot’s specific actions (Robot AI).
・Logistics system: Manages item lists and task-related information handled at the logistics site
・MEC AI: Uses task-related information from the logistics system together with camera images to generate subtasks and issue instructions to the robot
・Robot AI: Uses the subtask instructions from MEC AI to generate the optimal robot control commands for the situation on site
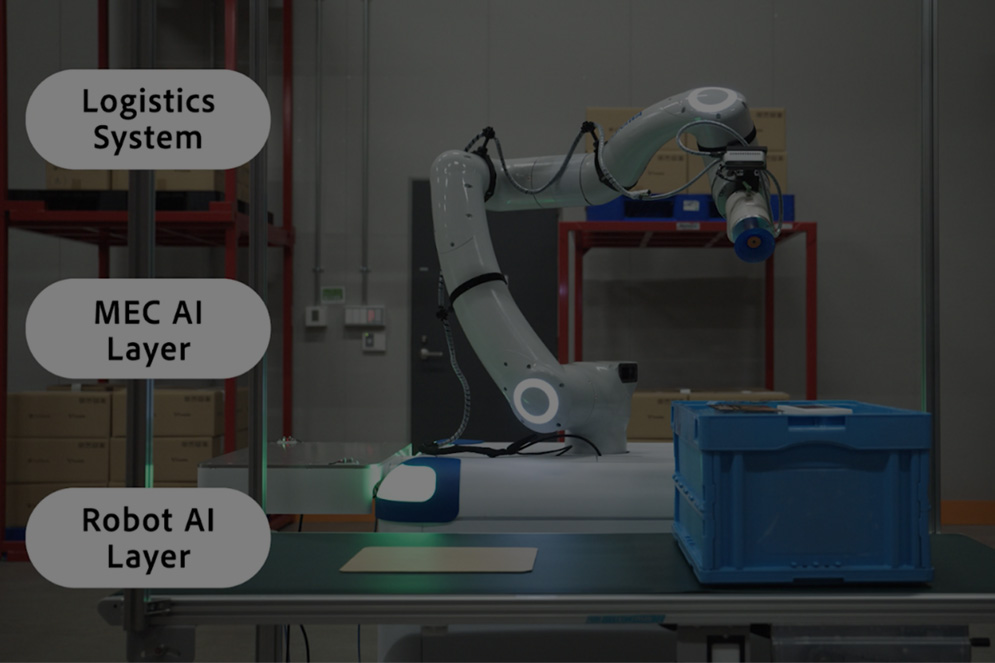
Configuration of the Physical AI system used in this verification
AI Running on the MEC Side
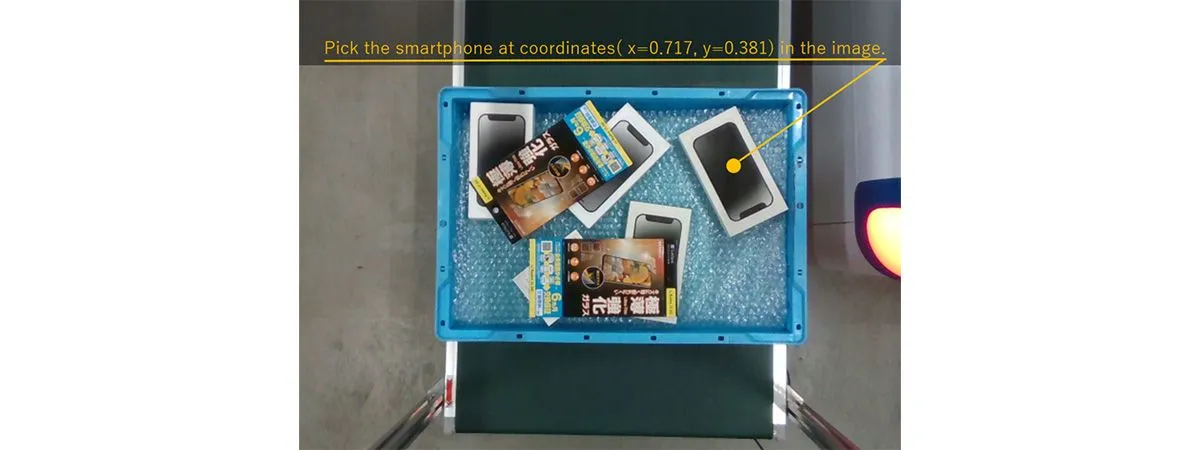
The VLM running on the MEC side takes as input a list of target objects to be placed on the mounting board together with camera images. It then outputs the positions of the objects to be grasped and the placement positions for the grasped objects.
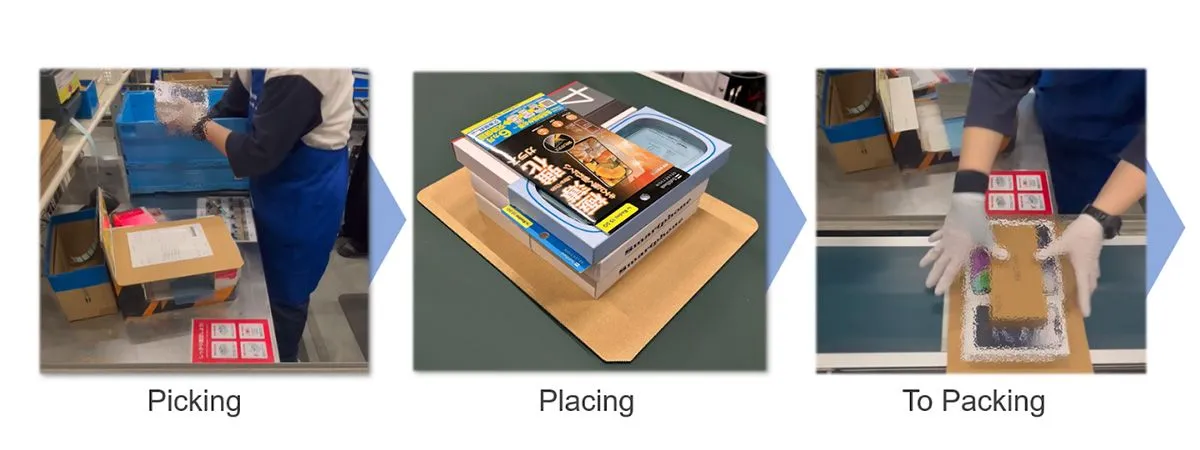
To train the VLM, SoftBank used training data labeled on the basis of actual on-site operations. This data consisted of smartphones and related accessories arranged in various patterns inside foldable boxes, annotated with the order in which they should be grasped and the locations on the mounting board where they should be placed.
As a result, even when presented with arrangements it has not seen before, the system can output the positions of target objects to be grasped as well as placement position information.
Example of training data used to train the VLM running on MEC
AI Running on the Robot Side
Processing that requires responsiveness and safety, such as generating grasping and placement actions according to the situation at hand, is handled by the VLA on the robot side.
The VLA takes as input the target object information included in the subtasks output by the VLM together with camera images, and outputs the joint angles required to determine how the target object should be grasped. By executing actions directly on the robot, the system can ensure the responsiveness and safety required for real-machine control while also linking with AI processing on the MEC side.

![[Overview] AI-RAN, the Social Infrastructure Supporting the AI Era](/en/corp/set/data/technology/research/topics/214/img/shared/thumbnail-122.webp)