![]()
Dispatcherの新機能
2020年5月11日
今回は私たちが開発を進める自動運転車両運行管理プラットフォーム、
Dispatcherの新しい機能のお話です。
ご存知の方も多いと思いますが、BOLDLYは自動運転車両の開発は行なっていません。自動運転車両をよりシンプルに管理・運営する為のサービス開発・インフラ整備に注力しています。
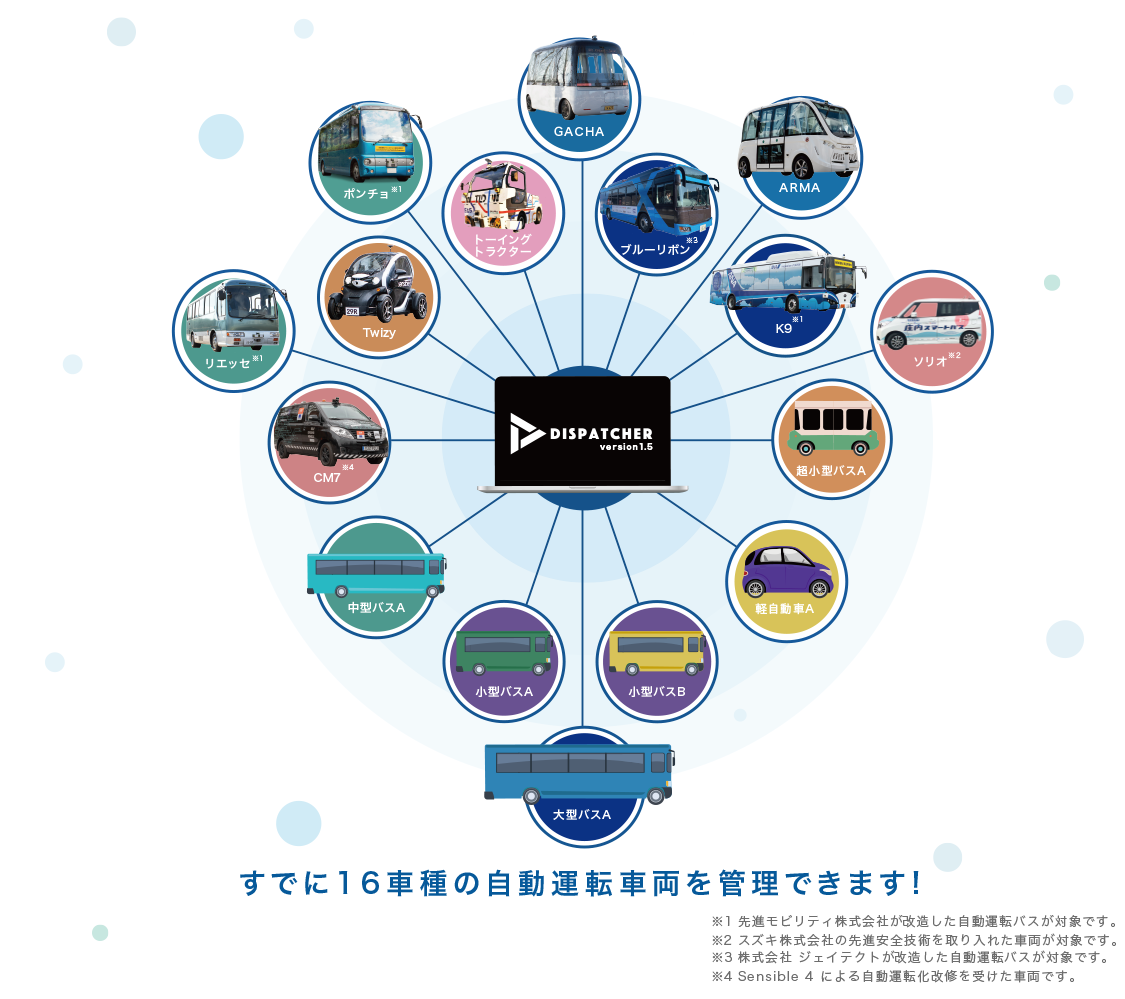
前回のレターでもお伝えさせていただいたように、将来様々な自動運転のバスが世の中を走ることを想定して、種類の異なる自動運転のバスでも容易に運行管理ができるシステム開発に取り組んでいます。その中ではDispatcherが接続できる車種を増やすことも重要な項目の一つであり、車種数を増やすことにも精力的に取り組んでいます。
現在の自動運転車両は進化を続けており、予め走行予定のA地点からB地点までの地図情報を含む経路設定をしておけば、基本的にはSTARTボタンを押すことで、車両は各種センサーを用いて周囲の環境を認識しながら自動で走行することができます。
ところで、自動運転車が走り出すきっかけとなるSTARTボタンは誰が押すべきなのでしょうか。せっかく自動運転で走れるのに、ここで人手が掛かるのは残念ですよね。発車の指示も自動化すればいいのに…、しかもちょうどいい間隔で次々に発車をしてくれたらいいのに…。
そんな想いから生まれたのがスケジュール走行機能です。
スケジュール走行機能
バスは公共交通機関であるからゆえに、『定時性』というのが大事なキーワードになります。決まった時間に走っているからこそ、その時間に合わせればバスに乗れ、利便性が高くまた乗ろうと思えます。
見逃したくないテレビ番組について録画予約で自動で録画させるように、バスを走らせたい時間に自動で発車させる機能、「スケジュール走行機能」を搭載しました。
2019年10月以降に実施したNAVYA ARMAを使ったほとんどの実証実験で、この機能を使ってあらかじめ設定された時刻になるとバスが自動で走り出す運用としています。
10月に実施した東京都のお台場・MegaWebで行われたARMAの実証実験では、バス経路の終点から次の始点までの回送区間について、オペレーターも下車させ、完全無人で回送させるデモも実施しました。
これも、アクティブミッションの機能を使ってあらかじめ発車する時刻を設定していたから、車内にオペレーターがいなくても走行できました。
決まった時間になったら発車する。
今は、バスのドライバーさんが当たり前に実施していることは、自動運転のバスに置き換わっても、同等以上のレベルで提供していきたいと考えています。
BOLDLYは自動運転が普及する社会に向けてこれからも新しい機能を開発していきます。
多くのお客様に、次に実施する実証実験のお問い合わせをいただいております。
新しくご案内可能な実証実験が決まった際には、HPかFacebook等でご案内させて頂きますのでお待ち頂けますと幸いです。
 までご連絡ください。
までご連絡ください。 までご連絡ください。
までご連絡ください。 までご連絡ください。
までご連絡ください。