プレスリリース 2018年
「JR東日本管内のBRTにおけるバス自動運転の技術実証」の
実施について
2018年12月7日
東日本旅客鉄道株式会社
先進モビリティ株式会社
愛知製鋼株式会社
京セラ株式会社
ソフトバンク株式会社
日本信号株式会社
日本電気株式会社
東日本旅客鉄道株式会社(代表取締役社長:深澤 祐二 以下「JR東日本」)、先進モビリティ株式会社(代表取締役社長:青木 啓二 以下「先進モビリティ」)、愛知製鋼株式会社(代表取締役社長:藤岡 高広 以下「愛知製鋼」)、京セラ株式会社(代表取締役社長:谷本 秀夫 以下「京セラ」)、ソフトバンク株式会社(代表取締役 社長執行役員 兼 CEO:宮内 謙 以下「ソフトバンク」)、日本信号株式会社(代表取締役社長:塚本 英彦 以下「日本信号」)および日本電気株式会社(代表取締役執行役員社長:新野 隆 以下「NEC」)はJR東日本が主催するモビリティ変革コンソーシアムにおいて、「JR東日本管内のBRT※1におけるバス自動運転の技術実証」を実施します。
JR東日本管内の大船渡線BRTにおいて、BRT専用道を用いて、車線維持制御実験、速度制御実験、正着制御実験、交互通行実験などを行うことで、バスの自動運転の技術実証を行います。
1. 実験の目的
本実証実験では、自動運転を行う上での課題解決に向け、JR東日本管内のBRT専用道で自動運転実験用バス(先進モビリティ保有:日野リエッセ)を使用し、バスの自動運転の技術実証を行います。
- [注]
-
- ※本実証実験では、自動運転区間においてもドライバーが乗車し、緊急時においてはドライバーが運転を行います。
- ※

2. 実験の概要
検証技術の概要は以下のとおりです。
(1)車線維持制御実験および速度制御実験
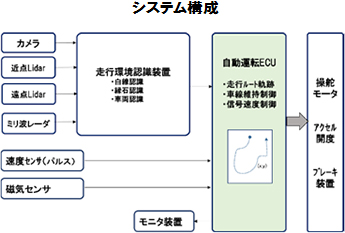
- BRT専用道上に設置した機器(磁気マーカ)の情報を高感度磁気センサ(MIセンサ)で読み取り、自車位置を正確に特定することで、専用道上を円滑に走行する実験を行います。
- 車両のアクセルとブレーキを自動制御し、BRT専用道上を最高40km/hで走行し、決められた位置でスムーズに停止する実験を行います。

(2)正着制御実験
磁気マーカの情報を読み取り、自動でBRT駅のホームに寄せて停止する実験を行います。

(3)無線を用いた信号制御による交互通行実験
車両の位置情報を無線でやりとりすることで、車両1台分の幅のBRT専用道を、自動運転バスと対向車両とが交互に通行するための実験を行います。

(4)その他
上記の実験に加え、QZSS(みちびき)※2などによる自動運転バス位置情報の測定実験や、無線機の電波到達距離の検証実験なども実施します。
- [注]
-
- ※実証実験技術の詳細は【別紙】をご参照下さい。
- ※
3. 実験場所・実証実験期間
実験場所:大船渡線BRT竹駒駅周辺(岩手県陸前高田市竹駒町)
実証実験期間:2018年12月12日~2019年3月8日
- 上記には、設備の設置・撤去工事などのみを実施する、自動運転バスが走行しない期間も含みます。
- 自動運転での走行試験はBRT専用道で行い、それ以外の一般道はドライバーが運転します。

4. その他注意事項など
- 今回は技術検証を目的としていることから、一般の方を対象とした試乗会は開催いたしません。
- 2018年12月12日~2019年2月28日の間、大船渡線BRTは竹駒駅前後の専用道を走行せず、一般道へ迂回運行いたします。
竹駒駅ののりばが変わりますのでご注意ください。(下図参照)
- 竹駒駅の待合室とトイレはご利用いただけます。

- [注]
-
- ※BRT専用道へは絶対に立ち入らないようお願いいたします。
- ※
【別表】実証実験の各社役割分担表
| 企業名 | 役割分担 |
|---|---|
| 東日本旅客鉄道株式会社 (実証実験全体責任者) |
|
| 先進モビリティ株式会社(共同実験リーダー) (自動運転車両責任者) |
|
| 愛知製鋼株式会社 (磁気マーカシステム責任者) |
|
| 京セラ株式会社 (路車間通信責任者) |
|
| ソフトバンク株式会社 (マルチGNSS※4端末責任者) |
|
| 日本信号株式会社 (信号装置敷設責任者) |
|
| 日本電気株式会社 (目標走行軌跡作成責任者) |
|
【別紙】実証実験技術の詳細について
自動運転車両の速度制御および正着制御
【先進モビリティ】
- 自動運転バス(ベース車両:日野リエッセ)を用いて実証実験を行います。
- 走行ルートに沿ってハンドル、アクセル、ブレーキを自動制御し、最高40km/hでの走行実験を行います。
- BRT専用道に設置された実際の駅(竹駒駅)を使用した正着制御(ホームに向かって密着して停止するようハンドルを自動制御)を実施します。
磁気マーカを用いた自車位置特定
【愛知製鋼】
- 走路に沿って敷設したフェライト磁石製の磁気マーカの微弱な磁力を、車両底部に設置した高感度磁気センサ(MIセンサ)で検知し、自車位置を正確に特定して車両制御を支援します。
- IoT・ビッグデータ時代に対応すべく新規に開発した、RFIDタグ※5付きの次世代磁気マーカを全国で初めてBRT専用道に敷設して読取性能を検証します。
- 磁気マーカシステムにより自車位置を高精度に特定し車両制御を行うことで、GPS※6の届かないトンネル・高架下などのロケーションや、積雪・濃霧などの悪天候による影響も受けることなく走行支援が可能になります。
【NEC】
- 道路設計図面上の線形や勾配などの情報を数値化、フォーマット化し、自動運転用に電子データへ変換したうえで、車両に提供することで、円滑な走行を支援します。
- 磁気マーカおよびRFIDタグを車両側リーダにて読み取ることで、自車位置を特定し、正確な軌道上での走行を支援します。

無線を使用した信号制御による交互通行
【京セラ、日本信号】
自動運転バスの位置情報を信号制御機へ無線通信し、信号情報を自動運転バスへ無線通信することによって、交互通行の通行権を提供する技術検証を行います。

【京セラ】
- 無線方式として、「LTE」と信号機連携の自動運転としては業界初となる「700MHz帯ITS無線」の活用を実証します。
- BRT専用道周辺において、乗用車を使用した無線検証実験も行います。
マルチGNSS端末による車両位置計測
【ソフトバンク】
QZSS(みちびき)、GPS、GLONASS※7の信号を受信可能な専用端末「マルチGNSS端末」により車両位置を測定し、LTEにより情報を送信します。
- [注]
-
- ※1BRT(Bus Rapid Transit)…バス高速輸送システム
- ※2QZSS(みちびき)…準天頂軌道の衛星が主体となって構成されている日本の衛星測位システムのこと。
- ※3LTE…携帯電話の通信規格(Long Term Evolution)
- ※4GNSS…人工衛星を使用して地上の現在位置を計測する「衛星測位システム」のうち、全地球を測位対象とすることができるシステム。全地球測位システムともいう。(Global Navigation Satellite System)
- ※5RFIDタグ…電磁界や電波などを用いた近距離の無線通信によって情報をやりとりするためのICチップが埋め込まれたタグ
- ※6GPS…アメリカの衛星測位システムのこと。
- ※7GLONASS…ロシアの衛星測位システムのこと。
- ※1