プレスリリース 2021年
世界初、水中で通信対象を自律的に追尾する
トラッキング技術による光無線通信の実証に成功
~Beyond 5Gによる海の産業革命を目指して~
2021年10月22日
ソフトバンク株式会社
国立大学法人東京海洋大学
ソフトバンク株式会社(代表取締役 社長執行役員 兼 CEO:宮川 潤一、以下「ソフトバンク」)と、国立大学法人東京海洋大学(学長:井関 俊夫、以下「東京海洋大学」)の後藤 慎平助教らの研究チームは、Beyond 5Gによる海の産業革命を目指して、画像処理技術、精密制御技術および可視光無線通信技術を活用して、通信対象を自律的に追尾する自動トラッキング技術による水中光無線通信システムを開発し、陸上から水中の遠隔操作ロボット(ROV:Remotely Operated Vehicle)に光無線通信経由で指示を与え、リアルタイムに制御する実証実験に成功しました。
船舶やROVなどの水中航走体の本体に有線接続され、本体に随伴して自律動作するトラッキング式の水中光無線通信機同士が自動で捕捉・追尾し合って通信を確立・維持している状態で、水中航走体を遠隔操作する実証実験の成功は世界初※1となります。
水中航走体と光無線通信機が一体である従来技術と比較して、水中航走体に随伴する自律動作型のトラッキング技術を活用することで、水中航走体による作業の自由度は大きく向上します。今後、この技術によって、自律制御ロボットの群制御による効率的な海洋資源管理や水中設備点検、海底灯台による海中航路や新航法の開拓による海の次世代モビリティの利活用といった新たな市場の創出が期待されます。
- [注]
-
- ※12021年10月22日時点(ソフトバンクおよび東京海洋大学調べ)
- ※1
1. 背景
近年、海洋国家である日本の沿岸・離島地域における水産業や海上輸送の高度化、洋上風力発電などの新産業や海洋観光などといった海域利活用の発展に向けて、海中で働く遠隔操作ロボットや自律航行ロボット向けの水中無線通信ネットワークへの期待が高まっています。しかし、海水・淡水を問わず水中では電波がほとんど透過しないため、既存の無線通信技術は利用できません。そのため、水中での通信には音波が使用されてきましたが、遅延やノイズなどの外乱の影響が大きく、伝送速度も数百キロビット毎秒程度と限られているため、大容量の映像伝送や観測機器のリアルタイム制御には課題がありました。
近年では、大容量・低遅延の可視光を使用した無線通信技術を水中の通信に適応する研究が各国で進められてきました。しかし、高出力を維持したまま遠方まで光を照射するには、ビーム幅の狭いレーザー光(概ね±10~15度程度)に頼らざるを得ないのが現状で、通信の質を維持するためには送信機と受信機の光軸を正確に一致させる必要があります。そこで、ソフトバンクと東京海洋大学は、水流などの影響により姿勢の保持が難しい水中航走体などに対し、大容量・低遅延の無線通信が可能な光無線通信の安定的な通信を実現する技術として、画像認識によるトラッキング技術に着目し、共同研究を進めてきました。
2. 手法
水中光無線通信にはビーム幅の狭い高出力のレーザー光などが使用されてきましたが、もともと光は音波や電波よりも極めて直進性が高いため、安定的な通信を実現するには通信機同士の向きが常に正対するように制御する双方向のトラッキング技術が有効と言えます(図1)。水中航走体は360度さまざまな方向から水流などの外乱の影響を受けることから、機体を操作または自律的に制御してビーム幅の狭い光無線通信を確立させるには、高度な機体制御技術と時々刻々に変化する外乱の影響を観測する装置が必要になります。特に、ROVなどの有索式水中ロボットは長い通信ケーブルが水流の影響を受けやすく、大深度(長距離)になるに従って機体の制御が難しくなります。また、小型・軽量化が求められる水中ロボットにとって、受光部を巨大化させることはトレードオフとなり、搭載できるロボットのサイズが限定されます。

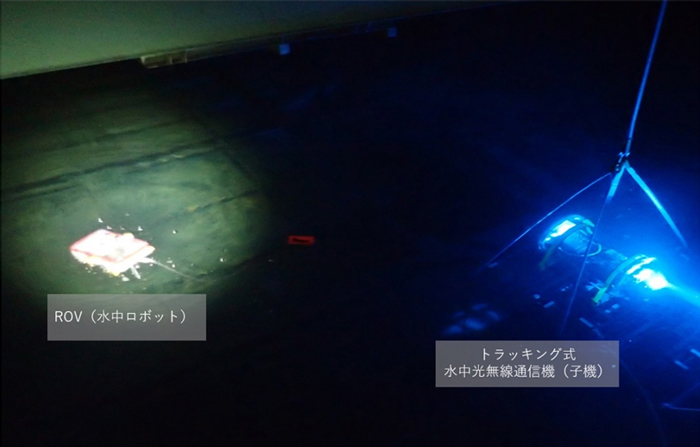
このたびの実証実験では、画像処理技術や精密制御技術を駆使して、水平方向に約60度、垂直方向に約60度の自動追尾性能を持ち、ROV(水中ロボット)本体から有線接続で独立して動作するトラッキング式水中光無線通信機を開発し、照射角7度の可視光無線通信機を使って、東京海洋大学の全長50mの船舶運航性能実験水槽の水深約1mで、2台の通信機(親機と子機)が互いを捕捉して自動で光軸を合わせ、さらに子機に接続されたROVを陸上のパソコンから操作する実証実験を行いました(図2)。

3. 成果
今回、新たに開発したトラッキング式水中光無線通信機を活用したシステムにより、照射角約7度の光無線通信機を活用した場合でも、双方がトラッキングを行うことで、水平約60度、垂直約60度の範囲で通信機がそれぞれ移動しても、通信が途切れずに約10Mbps以上の速度でデータ通信を行い、さらに子機に接続されたROV(図3)を陸上のパソコンからリアルタイムで遠隔操作する実証実験に成功しました(図4)。子機はROVと分離しているため、子機が親機と通信するための姿勢・移動制御がROVの姿勢・移動制御に及ぼす影響が少なく、安定した通信の維持とROVによる作業の自由度を両立できました。

4. 今後の展望
今回の実験結果から、自律動作型のトラッキング式水中光無線通信機を使用することで、水中航走体を安定的に制御することが可能になりました。これにより、海底ステーションと水中航走体のドッキングやデータ通信、有人潜水船から小型の航走体を発進させて狭小部を調査する技術、海底地盤の高精度な変化計測など、さまざまな分野での活用が見込まれます。今後、通信距離がさらに長くなると、実用的な水中(海中)無線通信ネットワーク網の構築によって海洋産業の効率化や新産業の創出など大きな経済効果が期待されます。ソフトバンクと東京海洋大学は、このようなBeyond 5Gによる海の産業革命の実現に向けて、より高度なトラッキング技術の研究開発を進め、通信距離1kmを超える長距離水中光無線通信の実現による、全球的な海中通信網の確立を目指します。
本件に関する企業・団体のお客さまからの問い合わせ先
| ソフトバンク | |
|---|---|
| 東京海洋大学 |
- SoftBankおよびソフトバンクの名称、ロゴは、日本国およびその他の国におけるソフトバンクグループ株式会社の登録商標または商標です。
- その他、このプレスリリースに記載されている会社名および製品・サービス名は、各社の登録商標または商標です。